英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
高速三体货船的船体形态发展
爱马金
计算机科学公司、高级海事中心、美国华盛顿特区
哈里斯和布伦纳
友谊系统有限公司、德国波茨坦
内容摘要:本文介绍了一种能运载约160只53英尺拖车,速度介乎26至32节的新型高速三体货船的船体形态发展。静水性能方面,特别是巡航速度和最高速度之间的权衡,是在第一性原理方法的基础上进行研究,利用非线性自由表面势流和边界层计算。在传统的设计过程中,是以中心船体和侧船体为基线设计。这些形状被用作部分参数模型的输入,通过该模型可以改变位移分布、球艏形状和侧船体错位。通过各种实验设计来研究设计空间,以发展对依赖关系的认识(探索)。然而,一种多目标遗传算法被反复使用来产生非支配的解结果(开发)。在两个显著速度下的能耗同时得到改善,同时观察到初稳定性等重要制约因素。拟议的HSTT设计涉及双重用途,作为军事机动的快速船和沿95号州际公路在美国东海岸的高速贸易运输。
- 绪论
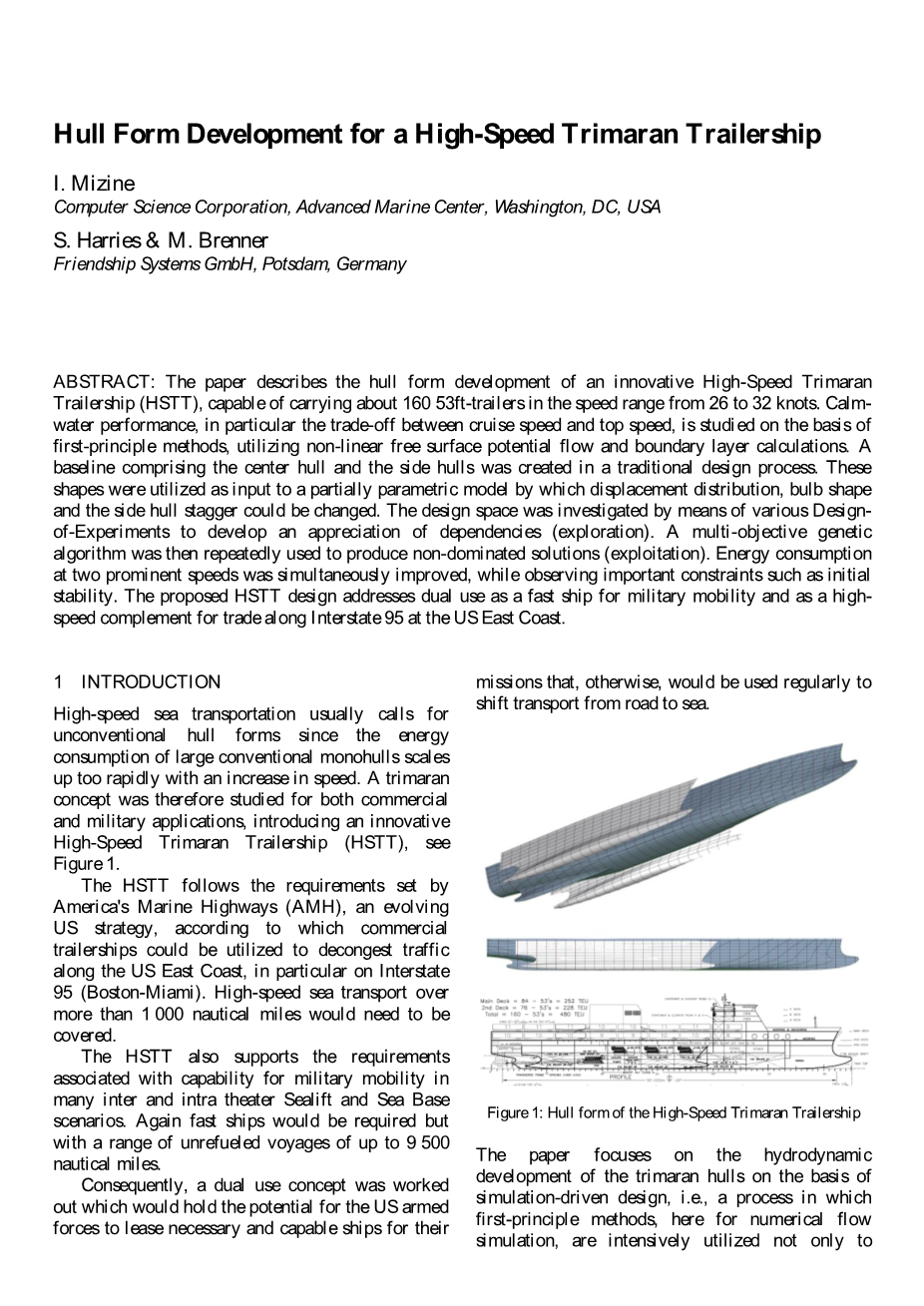
高速海上运输通常需要非常规的船体形式,因为大型常规单体船的能量消耗随着速度的增加而过快地增加。因此,在商业和军事应用方面研究了一个三体船概念,引入了一个创新的高速三体货船(HSTT),见图1。
HSTT遵循美国海运高速公路(AMH)的要求,这是一项不断发展的美国战略,根据这项战略,商业运输可用于解决沿美国东海岸的交通拥挤,特别是在95号州际公路(波士顿-迈阿密)。 超过1000海里的高速海上运输需要覆盖。
HSTT还支持在许多战区间和战区内海上运输和海上基地中与军事机动性能力有关的要求。同样燃料情况下可以比快艇多航行9500海里。
因此,制定了一个双重用途概念,这将使美国武装部队有可能为其任务租赁必要和有能力的船只,否则将被定期使用把运输从公路转移到海上。
图一: 高速三体货船的船体形式
本文在模拟驱动设计的基础上,重点研究了三角帆船船体的水动力发展,即第一性原理方法在此进行数值模拟的过程。
本文的布置如下:第2节介绍了三体货船设计的思想和要求。第3节概述了用于创建变体的部分参数化建模方法和用于评估其流体力学性能的流动模拟。第4节阐述了了解设计空间和确定有前途的候选船的正式研究。第5节提出结论和展望。
- 设计理论说明
HSTT采用(Vom Saal等人,2005年)和(Mizine等人,2009年)的重型空运支援船(HALSS)为原型来作为肋式三体货船开发的船体形式类型。HSTT船体形式在中心船体中有大部分位移,小水平面面积(SWA)侧船体提供稳定性,如图1所示。这艘船在8个海湾装载160x53英尺的拖车,在两个甲板上10个海湾装载240x40英尺的拖车。 上甲板有11排,第二甲板有10排,为结构(支柱)和通道提供空间。
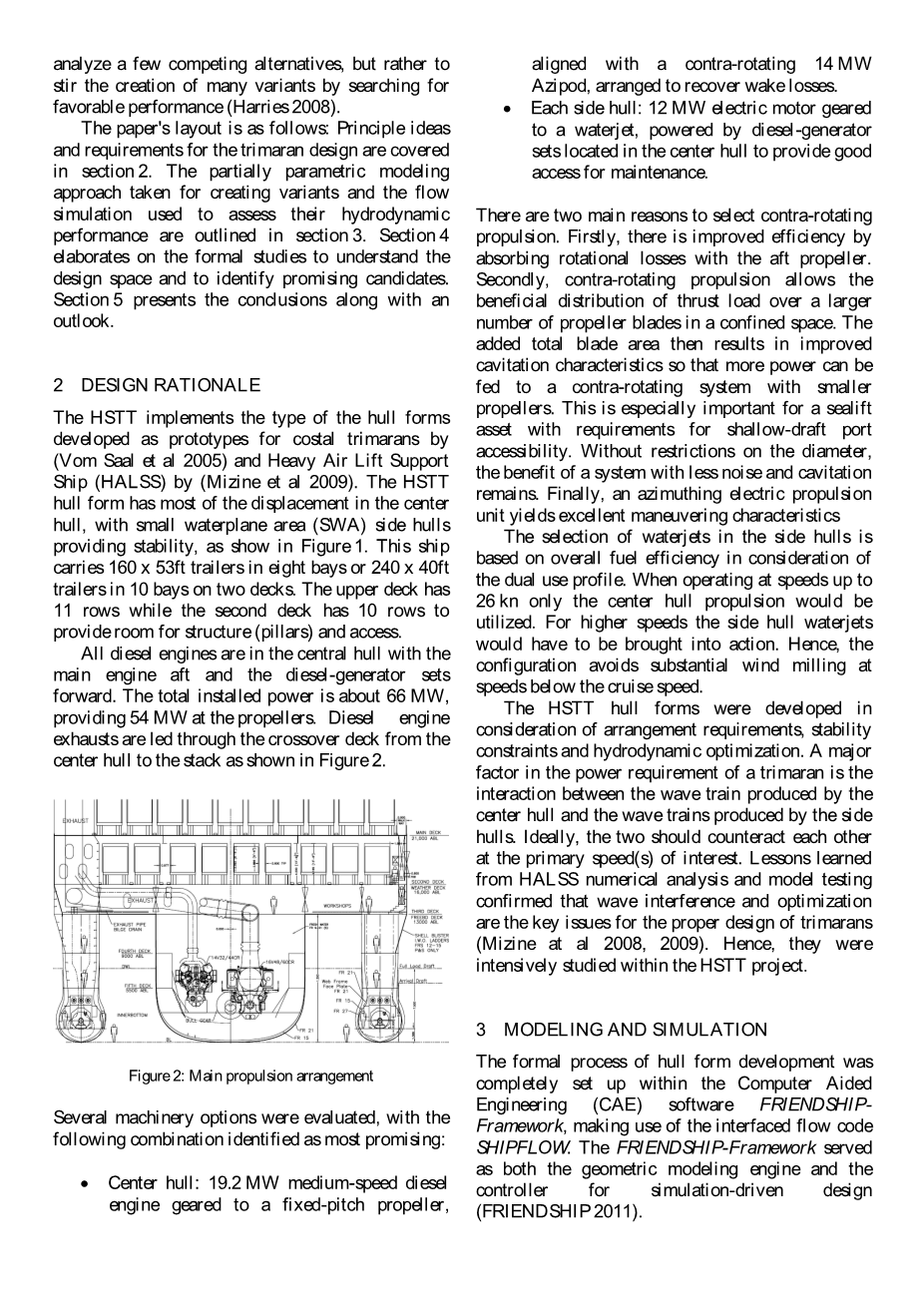
所有柴油机都在中央船体内,主机尾部和柴油发电机向船艏设置。总装机功率约66MW,在螺旋桨上提供54MW。如图2所示,柴油机尾气从中心船体排出通过交叉甲板到烟囱。
图2:主要推进结构
对若干机制备选方案进行了评价,以下组合被确定为最有希望的组合:
·中心船体:19.2兆瓦中速柴油发动机,用固定螺距螺旋桨,与对旋14兆瓦吊舱对齐,安排回收尾流损失。
·每侧船体:12兆瓦的电动马达,用于喷水,由位于中心船体的柴油发电机组供电,为维修提供良好的通道。
选择反向旋转推进有两个主要原因。首先,利用尾桨吸收旋转损耗,提高了效率。第二,反向旋转推进允许推力载荷在更多螺旋桨叶片上在受限空间内的有益分布。增加的总叶片面积可以改善空化特性,以便更多的功率可以馈送到一个反向旋转系统与较小的螺旋桨。这一点对于需要浅发港口的海上运输尤其重要。在不限制直径的情况下,噪声和空化较小的系统的好处仍然存在。 最后,叠氮式电力推进装置具有良好的机动特性。
船侧推进器的选择是基于考虑到双重用途剖面的整体燃料效率。当以26节的速度前进时,只能利用中心船体推进。为了获得更高的速度,侧船体的推进器将不得不投入使用。因此,该设计避免了以低于巡航速度航行时需要大量的风力机。
HSTT船体结构是在考虑布置要求、稳定性约束和水动力优化的前提下发展起来的。三体货船功率要求的一个主要因素是中心船体产生的波列与侧船体产生的波列之间的相互作用。 理想情况下,两者应以双方吸引的主要速度相互抵消。从HALSS数值分析和模型测试中获得的经验教训证实,波干扰和优化是正确设计三体货船的关键问题(Mizine,al,2008,2009)。因此,在HSTT项目中对它们进行了深入研究。
- 建模和模拟
在计算机辅助工程(CAE)软件FRIENDSHIP Framework中,利用接口流码SHIP FLOW,完全建立了船体形态开发的正式过程。FRIEND SHIP框架既是几何建模引擎,也是仿真驱动设计的控制器(FRIEND SHIP,2011)。
3.1、部分参数模型
由于在系统的船体形式开发之前,在Rhino已经建立了一个先进的初步设计,它决定利用现有的型线,并应用部分参数化建模的变化。与完全参数模型相反,在这个模型中,整个几何是从零开始分层构建的,例如, (Harries,2010),部分参数模型采用现有形状,仅通过参数指定所需的更改。一般的想法是在游乐园里有一个镜子室:扭曲的镜子会导致形状不同的图像,并产生或多或少有利的变体。
图3:没有倾斜的中心船体的例子变化(顶部:基线,中间:位移的最高增加,底部:球艏的最大膨胀)图4:侧船体位置的示例变化(顶部:基线,中间:侧船体的最前向位置,底部:侧船体的最外向位置)
图三中,纵移部分被应用于三体货船的中心船体,采用广义Lackenby方法纵向摆动部分以高度一致的方式(Abt和Harries2007),而表面位移被用来膨胀和放气灯泡。图四中,侧船体没有改变形状,而是纵向和横向移动,同时保持右舷-端口对称。
在研究过程中,多达七个部分参数模型被控制为自由变量,其中三个参数改变了中心船体的浮力纵向中心和被置换的体积,两个改变了球艏的体积和轮廓,而最后两个改变了侧船体的位置。
3.2、计算流体力学
计算流体力学(CFD)用于静水流体力学的典型选择目前包括自由波系的势流分析和薄边界层计算 另外,包括自由表面在内的全粘性流动分析。 正确选择CFD取决于准确性、速度和可用性之间的具体权衡。
三体货船的船体相当细长,波浪在26kn和32kn的速度下是最重要的(对应的傅汝德数分别为0.32和0.39,各自的参考长度约180m)的情况下,考虑了一种具有自由下沉和修整的非线性势流模拟,为变量的排序提供了有意义的结果。因此,优化是基于SHIPFLOW,利用软件带状方法的快速回转时间(FLOWTECH,2004,2009)。 图5:中心船体在26kn(上部)和32kn(下部)处的波浪产生
图5显示了没有侧船体的中心船体在两种吸引力的速度下的波浪产生,即26kn和32kn。通过比较图5中的上下半部,可以很好地观察到波长的变化和不同的干扰。波峰和波谷的不同位置和发音容易产生有利和不利的侧壳位置的假设,但也直接表明同一速度下对某以船侧有利的同时对另一船侧不利。
用SHIPFLOW进行的势流和边界层计算都是相对较快的,通常在平均工作站上有5-10分钟的中央处理机时间。
- 正式研究
4.1、有无导流尾鳍的设计
所提出的设计采用传统的螺旋桨加上牵引机模式下的反向旋转POD驱动器。因此,船体形状发展的一个重要问题是,中心船体推进器的特性是否会对所需的造波产生重大影响 在优化过程中应予以考虑。有无导流尾鳍两种设计被视为备选方法。图3、4和6给人留下了印象。
为了解释问题,进行了第一次实验设计(DoE),只改变了中心船体,而不改变侧船体。对于有无导流尾鳍的变化,同时分析巡航速度和最高速度。
图6显示了具有代表性的不通电在中心船体上的压力分布。 可以看出,接近导流尾鳍,压力分布变化正如预期的那样。沿船体的自由表面,即刺激波浪产生最多的区域,很少发生差异。图7举例描述了一个不同的叠加波和它没有导流尾鳍的对应波。波浪高度的等值线,似乎非常接近对方,特别是船体的尾部,来源于另一个尾部。在船身前体中,几乎没有什么区别,而远处的偏差是相当微妙的。在绘制带有导流尾鳍(纵坐标)的设计与没有导流尾鳍(横坐标)的设计的所有不同的波阻时,图8显示了两种设计的排名并没有真正受到影响。对于速度较低的26kn,所有变量几乎排成一条直线。对于较高的速度32kn,有一些小的振荡变量(红色矩形),表现同样好。 图6:在26kn处有和没有导流尾鳍的中心船体的压力分布(侧面船体省略) 图7:有和没有导流尾鳍两种情况下中心船体产生的波浪覆盖。(侧面船体省略) 图8:有和没有倾斜的中心船体的波浪阻力的排列(侧面船体省略)
因此,得出结论认为,波阻优化无论是否使用导流尾鳍都可以进行,然后合理地推广。它由对带有导流尾鳍的基线的长远研究决定。尽管如此,图8所示的相关性给出了一个令人欣慰的想法,即如果一艘没有导流尾鳍的船只最终被探讨,不必重复整个练习。
4.2研究
为三体货船配置运行了一个具有250个变体的综合DoE,其自由变量作用于主船体的形状和中心船体的位置:
· delta;CP:间隔内棱形系数的变化[-0.01,0.035]
· delta;X CB:LPP纵向浮力中心的变化[-1%,1%]
· midTan:主截面移位函数切线的变化,[-60°,60°]
· 球艏顶部Dz:球艏顶部在间隔内的垂直运动[-1m,0.8m]
· 球艏饱满系数:通过[0,2]内的表面位移增加球艏体积
· 侧船体Dx:侧船体纵向位置,基线,[-10米,20米]
· 侧船体Dy:侧船体横向位置,基线,[-2m,2m]
对各种不同的阻力成分和不同的静水性能进行了评价,以总阻力为主要目标。就速度而言,这项调查仅限于巡航速度26kn。 DoE的目的是了解系统在设计空间内的行为,并确定有希望进一步开发的区域(见下一节)。 图9:带有导流尾鳍的三体货船在26kn时的压力分布
在侧船体位置的影响下,DoE的结果显示出很强的优势,而主船体参数的影响则小得多,基本上消失在背景干扰中。正如前面所讨论的,船侧对阻力的影响主要是由波型中有利或不利的干扰以及压力分布的变化所决定的主船体的分布,如图9所示。 图10:三体货船纵向(顶部)和横向(底部)侧船体位置在26kn处的变体的性能
特别是侧船体的纵向位置与设计变量范围内的阻力有很强的线性关系,如图10所示。在26kn的速度下,只要LCB的位置不受以上原因的负面影响,显然更好地将侧船体向前移动。 横向位置有一个较小,但仍然对阻力有重要影响,见图10底部。有利于将侧船体向内移动,更接近主船体,这里的决定性约束是稳定性。
4.3、开发
由于以往设计船体结构的经验,决定先对最有利的侧船体位置分别进行优化,同时考虑到其阻力两个相关的速度。由于单个速度的相关性不足以在单个目标函数中获得有意义的加权,因此选择了一种多目标优化算法。这将产生一组非支配的解决方案,然后可以从中选择合适的折衷设计。所选择的算法是非支配排序遗传算法 m NSGA-II(DEB,2002年),13代,每代人口12人。变异概率设定为0.01,交叉概率设定为0.9。
第一次优化运行与全范围的侧船体变量和恒定的中心船体形状产生了150个可行变体和不同的帕累托边界,见图11。第一个结论是,从这套设计和更高速度的附加数据中可以明显看出,纵向侧船体位置对两个阻力的影响是相反的。船侧在26kn时向前移动是有利的,但在32kn时对阻力是不利的。此外,向内移动侧船体在26kn时影响较小,而在32kn时影响较大。可以观察到的一个有趣的特征是,在帕累托集合的上半钩状局部最小值。位于这个钩子尖端的设计(图11中的c)和其他四个有趣的设计被选择作为进一步研究的起点。 其他四种设计:
· 设计(A)最低功率要求为26kn。 最大功率要求(32kn)高于基线。
· 设计(B)具有相同的最大值。 功率要求作为基线(可以使用相同的发动机),但功率要求在26kn时降低。
· 设计(D)与基线相同的功率要求在26kn,但有较小的最大电力需求。
· 设计(E)功率要求最低最大值,但26kn时的功率要求高于基线。
从这些设计中的每一个开始了局部多目标优化(N SGA-II).. 中心船体的设计变量包含在这些优化运行中,而中心船体的范围和船侧变量仅限于当前值附近。每次运行产生了50至250个附加变量。目的是为每个选定的侧船体位置找到最佳的中心船体,允许对这一位置进行一些调整。虽然其他的运行主要停留在帕累托集合的区域,但运行从“钩子”尖端的变体开始,通过进一步增强该区域产生了最有趣的结果。
图11:26kn(水平轴)和32kn(垂直轴)的三体货船变体的有效功率要求
图12:侧船体位置的设计空间。 纵轴上的纵向位置,横轴上的横向位置。
图12可以看出,通过检查侧船体位置设计空间中变体的分布,有一些更有趣的信息。显然,局部优化形成了不同的集群。帕累托集由左上边框反映,左上角的“钩”局部最小值。图11中的“钩子”上方的所有设计都在上边框上,图11中的右边和下面的设计都在左边框上。这张图似乎很好地说明了帕累托边界的具体形状。
正如之前的研究所预期的那样,最终的优化设计具有侧壳的内向和前向位置。体积略有下降,中心船体的浮力中心几乎没有移动。此外,球艏明显更饱满,球艏尖端更高。详见表1。
图13:三体货船产生的波浪在26kn(顶部)和32kn(底部)。 每幅画的上部:基线,下部:有利的设计。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236711],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 船舶在浅水航道中航行时的岸壁效应数值研究外文翻译资料
- 基于三维面元法限制水域船体下蹲的数值研究外文翻译资料
- 关于甲板大开口船体梁极限抗扭强度的实验研究外文翻译资料
- 基于斯托克斯方程计算和系统识别 方法预估实船操纵模型参数外文翻译资料
- 水面舰艇5415在PMM演习中的基准CFD验 证数据-第二部分:平均相位的立体PIV流 场测量外文翻译资料
- 初步设计阶段船舶功率推进预测第二部分初步设计中有用的服务速度船舶功率推进数学模型外文翻译资料
- 对某高速船模湍流自由表面的数值与试验研究外文翻译资料
- 第三章水下搜救与恢复操作外文翻译资料
- 液化天然气供求关系的现状与展望:一个全球性展望外文翻译资料
- 基于CFD的高层钢结构建筑风效应数值评估外文翻译资料

