
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
使用安全池检查横浪中拖网渔船的稳定性
国际船舶与海洋工程学院,马斯拉克34469,伊斯坦布尔,土耳其
摘要
这项研究的重点是通过使用数值和分析的安全池概念检查BSRA的拖网渔船在横浪中的横向稳定性,并且展示安全池的概念如何用于评估拖网渔船的稳定性。在研究的第一部分,数值安全池的概念被用于分析船舶横摇方程式和那些引起船舶倾覆的参数。然后,对于给定的载荷条件,获得拖网渔船的最大允许波高和风速的安全运行条件。在研究的第二部分,将给定的操作和载荷条件带入Lyapunov直接法就能够确定非线性横摇的分析安全池。通过比较分析和数字安全池的获得得到了分析安全池和数字安全池有一致性的结论同时这种一致性的分析安全池更加保守。
- 介绍
横浪中的抗倾覆稳定性一直是研究人员的热门方向,因为它在设计一艘大洋船舶中非常重要。研究人员在过去五十年中开发或使用了不同的技术和方法来确定横浪中的倾覆稳定性。例如,进行缩放模型测试(Wright和Marshfield,1980; Grochowalski,1989和Cotton and Spyrou,2001),以确定抗倾覆的稳定性条件,分析近似方法;多尺度方法(Nayfeh和Khdeir,1986),扰动法,谐波平衡法(Senjanovich和Fan,1996),Bogoulibov Mitropolsky渐近法(Cardo,Francescutto和Nabergoj,1981)用于获得非线性横摇运动方程的近似解,数值求解方法(如四阶Runge Kutta方法)用于解决非线性滚动运动,数字安全池(Thompson,1989; Soliman和Thompson,1991; Ucer和Odabasi,2008a和Long,Lee和Kim,2010) ,Melnikov方法(Falzarano,1990),Lyapunov指数(McCue,2004)和Lyapunov直接法(Odabasi,1978; Ozkan,1981和Caldeira-Sariava 1986)用于确定抗倾覆的稳定性条件。
B'ocki (1994)发展的一个船舶倾覆的模型是基于一艘滚装船在无规则横浪中一组高波短时间内打在船身上引起的激励力矩的作用。在这项研究表明,船舶进行线性滚动运动,直到激发力矩发生。初始条件下的概率密度函数接下来就很容易建立,假设变量之间两两独立,并且服从高斯分布。由于一组高波的产生,船舶运动被描述为一个非线性的SDF公式。尽管不规则波和一组高波被视为已知圆频率的规则波,但是平均频率是相等的,具有确定的激发效果。 在本文中,用数值和分析安全池的概念确定BSRA拖船在大浪和温和海域的倾覆运动。
Thompson(1989)和Soliman和Thompson(1991)引入了数值安全池对非线性船舶横摇运动和倾覆研究的概念。在这种方法中,单自由度动态系统的演进解决方案被绘制为相空间中的轨迹,而不是时间历程(Long,Lee和Kim,2010)。在本研究的第一部分中,使用数字安全池的概念和由给定的载荷条件确定的安全运行条件(如最大允许波高和风速)分析了BSRA拖网渔船(Pattullo和Thomson,1965)在横浪海洋中的横向稳定性。
在本研究的第二部分中,通过Lyapunov直接方法(La Salle 和Leftschez, 1961; Odabasi, 1978 和 Ozkan, 1981)给出了给定操作(如波高)和载荷条件,确定了稳定(风效应)的非线性滚动运动的分析安全池。比较分析和数值获得的安全池可以看出,分析获得的安全池更保守,但与数值获得的安全池也是一致的。
- BRAS拖网渔船系列
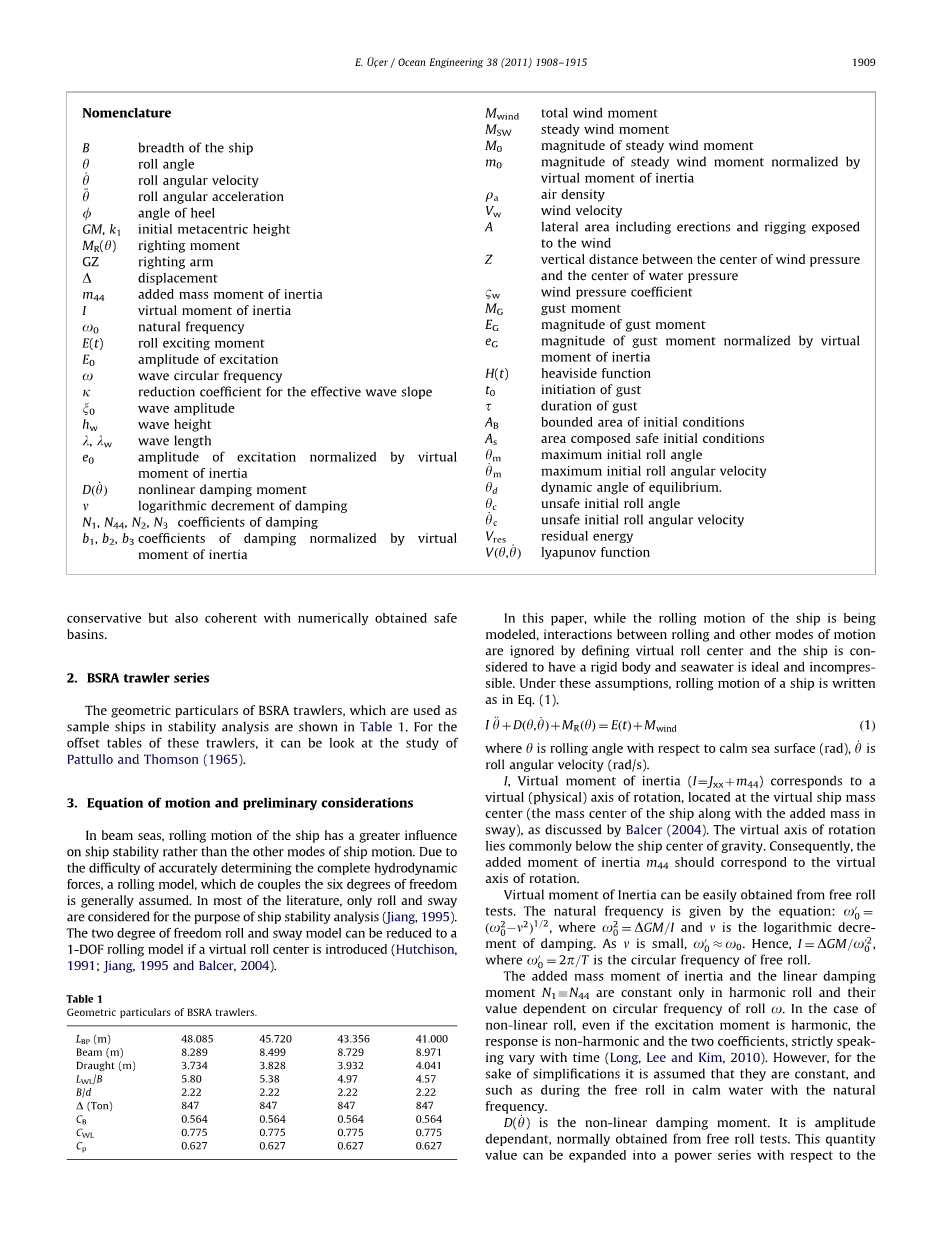
用于稳定性分析的样本船的BSRA拖网渔船的几何细节如表1所示。对于这些拖网渔船的偏移表,可以查看Pattullo和Thomson(1965)的研究。
- 运动方程和初步考虑
在船舶航行中,船舶的横摇运动对船舶的稳定性影响较大并且大于船舶其他运动的影响。由于难以准确地确定完整的水动力,所以通常假设脱离六自由度的滚动模型。在大多数文献中,为了船舶稳定性分析的目的,只考虑滚动和摇摆运动(Jiang,1995)。如果引入虚拟滚动中心,则可以将两自由度滚动和摇摆模型简化为1自由度滚动模型(Hutchison,1991; Jiang,1995和Balcer,2004)。在本文中,在对船舶的滚动运动建模的同时,通过定义虚拟滚动中心来忽略滚动与其他运动方式之间的相互作用,认为船舶具有刚性并且海水是理想和不可压缩的。在这些假设下,船舶的滚动运动如公式 (1)。
其中theta;是船舶相对海平面的翻转角度,是船舶翻转的角速度(rad/s)
I,虚拟转动惯量(I=Jxx m44)对应于虚拟(物理)旋转轴,位于虚拟船体中心(船与摇摆中的附加质量的虚拟中心),如Balce所描述的(2004)。虚拟旋转轴线通常位于船舶重心的下方。 因此,增加的惯性矩m44应该对应于虚拟的旋转轴。
虚拟转动惯量可以从自由滚动测试中轻松得到,固有频率由下式给出:。其中并且是阻尼对数减量。由于很小,所以,因此,其中是自由滚动的圆频率。
增加的质量惯性矩和线性阻尼力矩仅在谐波滚动中是常数,其值取决于转动轴的圆频率。 在非线性转动的情况下,即使激发力矩是谐波,响应也是非谐波,严格说来,两个系数随时间而变化(Long,Lee和Kim,2010)。然而,为了简化起见,假设它们是恒定的,例如在具有固有频率的平静水中的自由转动。
是非线性阻尼力矩,它取决于幅度,通常是从自由滚动测试获得的。该量值相对于转动速度可以扩展为幂级数,包含偶数项
其中,等等是阻尼系数。
这三个条件一般能提供良好近似。使用两个术语,足以满足要求。由于倾覆与船舶的大角度转动相关联,第三项N3 lt;0是必不可少的。没有它,横摇动运动的阻尼力矩被高估了,导致过高估计船舶在海洋中的稳定性。 在这项研究中,认为只有两个条件(N1,N2)表明了阻尼增量对船舶稳定性的影响。N1使用线性船舶运动程序SHIPMO.BM(Beck和Troesch,1990)确定,其包括Himeno(1981)的转动阻尼校正。N2从0增加到0.02I,增量为0.005I,以显示改进的阻尼特性(如使用舱底龙骨,叶片等)如何影响船舶的稳定性。
是平静水中的扶正力矩,可以表示如下:
其中△是浮力,GZ是滚转角的函数的扶正臂。 GZ可以通过奇数多项式近似,最好通过七阶奇数多项式获得(Pawlowski,1987)。因此,在本研究中,使用七阶多项式来确定GZ曲线。
其中是横倾角度,GM是初始高度。
E(t),转动激励力矩是由于规则波产生的流体动力学力矩。这一力矩是根据线性理论计算的,其中船舶处于直立状态,可以近似如下(Senjanovic et al。,2000)。
其中k是有效波形的减小系数,k1表示初始中心高度GM,是波数,是波幅,是波形圆周频率。假设相对于和可以忽略不计,上述方程式为
其中是波浪激励的幅度。由于实际谐波不能任意陡高,所以波形斜率小于11°
滚动激励力矩E(t)的方程式是合理的,只要转动角度theta;不超过甲板沉浸的角度或舱底从水中出来的角度,以较小者为准,也就是说,水线 (或更准确地说,波浪形)与船的两侧相交。对于大转动角度,激励力矩的振幅成为滚动角的函数。
Mwind,风力矩由两部分组成,稳定的风和阵风。 假定稳定的风力矩(Msw)取决于转动角度(Wendel,1967和Odabasi,1976),并定义如下
其中M0表示直立位置的船上的侧风力矩,并且等于以下表达式
根据大量实验1.3(Wendel,1967),其中是空气密度,V是风速,A是横向区域,包括暴露于风的装置和索具。Z是风压中心与水压中心之间的垂直距离,实际上被视为暴露区域中心与半通风点(m)之间的垂直距离,为风压系数;。
阵风力矩也是滚转角度来源,可以定义如下(Ucer和Odabasi,2008b):
其中EG是阵风力矩的量纲,G(t)可以被定义如下:
其中t0是阵风的开始,t是阵风的持续时间,H(t)是Heaviside函数定义如下:
根据这些假设,方程 (1)可以写成如下所示:
将方程的两边除以虚拟转动惯量,取代波长,得到表达式 (3):
- 检查使用数字安全池的拖网渔船的稳定性
在本节中,使用数字安全池的方法分析了船舶经受常规波中短波脉冲的瞬态运动(Soliman和Thompson,1991; Rainey和Thompson,1991; Ucer和Odabasi,2008a,b和Long, Lee和Kim,2010)。
4.1确定数字安全池
非线性动力系统的稳定性对初始条件的变化非常敏感。 例如,初始侧倾角速度的小增量可以改变船的稳定性(参见图1a和图b)。因此,应检查数千个初始条件以确定动态系统(船)的稳定性。在数字安全池方法(Thompson,1989)中,安全和不安全的初始条件分别由白点和黑点表示,数千个初始条件对动态系统(船)稳定性的影响可以只用一个图形表示(见图2)。
安全池是定义在侧倾角和侧倾角速度相位空间中的一组安全初始条件。 具有0.39米中心高度(GM)和5.8长梁比(L / B)的BSRA拖网渔船的安全池如图1所示。 在这个图中,黑点代表的初始条件,会导致倾覆,而白点代表安全的初始条件。
4.2方程参数的影响
图1
关于公式(3)船舶受到谐波激励,由于是非线性方程,其响应是非谐波的,或者也可以说是混沌的。船舶是否倾覆取决于初始条件,激励幅度,间接条件有波高,波频和阻尼。
图2
如图3所示,当波频()为0.7rad / s,风速为15m/s时,显示了作为归一化波高的函数的组合安全初始条件(AS)的区域与初始条件(AB)的区域的比率。当比率(AS/AB)
等于1时,整个初始条件是安全的。 当该比率等于零时,初始条件都不是安全的。
图3
从图3可以看出,当归一化波高小于0.5时,安全池的边界是光滑的。当归一化波高等于0.5时,发生同型相切现象。 盆地边界突然发展出无数稀薄的逃逸晶须(Rainey和Thompson,1991)。 当归一化波高增加超过0.5时,无限薄的逃逸晶须快速生长成厚壁(见图3)。 安全池的边界在同质相切点之后是分形的。 一定波高(h)后,安全池完全消失。 在这项研究中,对于给定的波频和风速,he等于8m。
Ucer和Odabasi提出了剩余能量来确定起源周围最小安全池的想法(2008a,b)。残余能量的大小表示围绕原点的安全域的宽度。 通过剩余能量的增加,安全池的大小增加,换句话说,船舶的生存能力增加。 当剩余能量等于零时,就没有滚动运动的安全池。而给定波高和波频的船舶剩余能量分三步确定:
第一步:确定初始条件,其通过积分方程式(3)造成倾覆。
第二步:使用公式(5)计算这些不安全初始条件的能量。
(5)
其中Vi是能量,m是初始条件的数量,其导致倾覆。
步骤3:剩余能量(Vres)是步骤2中获得的最低能量。
用于检查BSRA拖网渔船(L / B = 5.80,GM = 0.39m, = 0..7,b1 = 0.034,eg = 0)的稳定性的样本剩余能量曲线如图1所示。 从该图可以看出,剩余能量随着风速的增加而减小。 这也意味着,船可以忍受陡峭的风浪与风速的增量。在这项研究中,同宿切现象的发生被假设为最大允许波高的极限。从图4中可以看出,剩余能量开始迅速下降,在同源相切发生之后变为零。
图4
如图5所示,显示了BSRA拖船(L / B = 5.80)二次阻尼系数(b2)下最大允许波高的变化。 从图中可以看出,阻尼系数(b2)的增加导致最大允许波高的增加。
因此,如果可以使用诸如舱底龙骨等等的各种部件来增加船舶的阻尼力矩,那么船舶可以承受更多的陡峭的波浪。
图5
在图6中,最大允许波高的变化取决于阵风力矩(eg)的大小与稳定风力矩(m0)的大小的比例。持续的阵风()是十二波周期而稳定风的风速(vwind)是10米/秒。 当滚动角度达到第一个最小负值时,阵风开始作用于船(t0)。从图6可以看出,随着阵风力矩的增加,拖网渔船可以承受更陡的海浪。
图6
如图7所示,显示了不同/ B比率下由风速引起的最大允许波高的变化。 从该图可以看出,l / B和风速比的减量导致最大允许波高的增加。
如果在整个船舶的装载条件下获得安全运行条件(如最大允许波高和风力),则可以转换为船长或港口当局的使用图表。 使用该图表,可以根据港口当局或船长的预测天气情况分析船舶的安全性。
图7
- 非线性滚动运动的安全池分析
5.1自由滚动运动的渐近稳定域
定理(La Salle和Lefschetz,1961):
令是具有连续第一偏导数的标量函数。 令表示区域的分量。 假设是有界的,内是。
令R是中所有点的集合,其中Lyapunov函数的导数小于等于零,并且令M为R中的最大不变集合。然后,中的每个解随着趋于M。
自
全文共8792字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[143725],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 船舶在浅水航道中航行时的岸壁效应数值研究外文翻译资料
- 基于三维面元法限制水域船体下蹲的数值研究外文翻译资料
- 关于甲板大开口船体梁极限抗扭强度的实验研究外文翻译资料
- 基于斯托克斯方程计算和系统识别 方法预估实船操纵模型参数外文翻译资料
- 水面舰艇5415在PMM演习中的基准CFD验 证数据-第二部分:平均相位的立体PIV流 场测量外文翻译资料
- 初步设计阶段船舶功率推进预测第二部分初步设计中有用的服务速度船舶功率推进数学模型外文翻译资料
- 对某高速船模湍流自由表面的数值与试验研究外文翻译资料
- 第三章水下搜救与恢复操作外文翻译资料
- 液化天然气供求关系的现状与展望:一个全球性展望外文翻译资料
- 基于CFD的高层钢结构建筑风效应数值评估外文翻译资料

