
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于地面激光扫描的隧道变形分析
,和
(1:鹿特丹 r.vangosliga@gw.rotterdam.nl。2代尔夫特理工大学,代尔夫特地球观测与空间系统研究所; r.c.lindenbergh@tudelft.nl。3:自然灾害管理中心,因斯布鲁克; norbert.pfeifer@uibk.ac.at。)
摘要:开发,实施和测试了一个程序来检测钻孔中的变形。在隧道施工完成之后,即在两个测量时期之间,也可考虑完成的隧道相对于设计模型的变形,可能会发生变形。对于这个过程,首先使用线性迭代最小二乘法将隧道模型拟合到由几个登记的地面激光扫描组成的点云。这导致隧道模型的近似最优值。然后通过统计测试程序确定相对于该隧道模型或时代之间的变形。与鹿特丹市一起进行的结果表明,研究的隧道不是椭圆形 作为一个整体,如预期的那样,单个隧道段显示不同的偏差模式。
关键词:地面激光扫描;点云建模;隧道变形监测
一、引言
在鹿特丹,正在建造一条新的海牙公共交通工具,名为。对于这条新的轻轨连接,鹿特丹北部的隧道将变得无聊. Rotterdam(GW)的(LV)负责对这条隧道的施工进行测量。除了常规的速度测量,例如,(和,2003),并且,LV想要使用地面激光扫描来确定隧道变形。通过速度测量,可以高精度地检测到小的变形,但是由于主要的手动测量过程,仅仅对于几个选定的位置。另一方面,激光扫描最适合于测量区域,但提供的精度较低。假设是测量的大量点可以补偿精度降低,并允许研究整个隧道表面的变形。关于用地面激光扫描进行变形分析的可能性很少了解(,2006),因此本报告中描述的搜索已经被执行了。(Schulz和,2004)中也讨论了地面激光扫描的隧道测量。隧道表面观测也可以通过摄影测量手段进行,例如使用系统(,2006),或与激光扫描相结合(等,2005)。单独使用激光扫描具有允许快速测量的潜力,覆盖整个隧道表面,最终提取变形,所有这些都不需要精心设计的校准任务。
现有激光扫描仪的清单(,2004; POB,2006)表明,基于相位的扫描仪对于钻孔隧道中的测量是最有效的。 这种类型的扫描仪可以快速测量,即测量速率超过每秒100000点。 与基于脉冲往返时间的扫描仪测量范围相比,基于相位的扫描仪也表现出更好的精度。 然而,测量范围较短,通常高达50m。 高测量速度导致高点密度。 扫描从固定扫描位置获得。 或者,扫描可以由移动扫描器执行(等人,2005)。
为变形分析设计的方法估计对象的分析模型。对于无孔隧道,这是通常是遵循理想构造计划的圆柱体或多孔复合模型(例如,椭圆柱体)。通过使用最小二乘法调整的模型拟合来估计模型的参数。扫描数据和模型之间的差异是隧道相对于施工计划变形的指示。此外,将在两个不同时期收集的扫描数据进行比较以显示时间的变化。扫描数据被划分为单元格,栅格布置在对象上。对于两个扫描,都使用相同的分区。对于每个单元格,通过使用简单模型调整扫描数据来确定网格点,简单模型是整个分析模型的局部近似。使用稳定性测试,测试两个相应的网格点是否在时间上稳定。进行激光扫描变形检测的测量设置,并在第二次中进行测试测量。然后为变形分析拟定了一种方法,并对采集的数据进行了实践。数据由属于激光扫描仪的软件和由编写的计算程序处理。
在第2部分提出了方法论,包括气缸装配和变形分析。第3部分描述了数据采集和处理。在最后一节中,对l的分析和所使用的方法进行了总结,同时确定了改进过程的未来工作。
二、方法
2.1气缸配件
扫描仪坐标的观察。地面光扫描装置的原始测量是角度和范围,也称为距离。对于每个三维物体点在球面坐标系,和距离之间的角度被测量。因此
(1)
虽然角度的测量精度和仅取决于装置本身,但是距离精度还取决于反射表面的材料性质,其程度以及激光在表面上的入射角。测量在扫描仪局部的球面坐标系中执行,但是平移和旋转被应用于注册过程中的点。在下文中,假设一组对象或观察点在公共球面坐标系中给出。
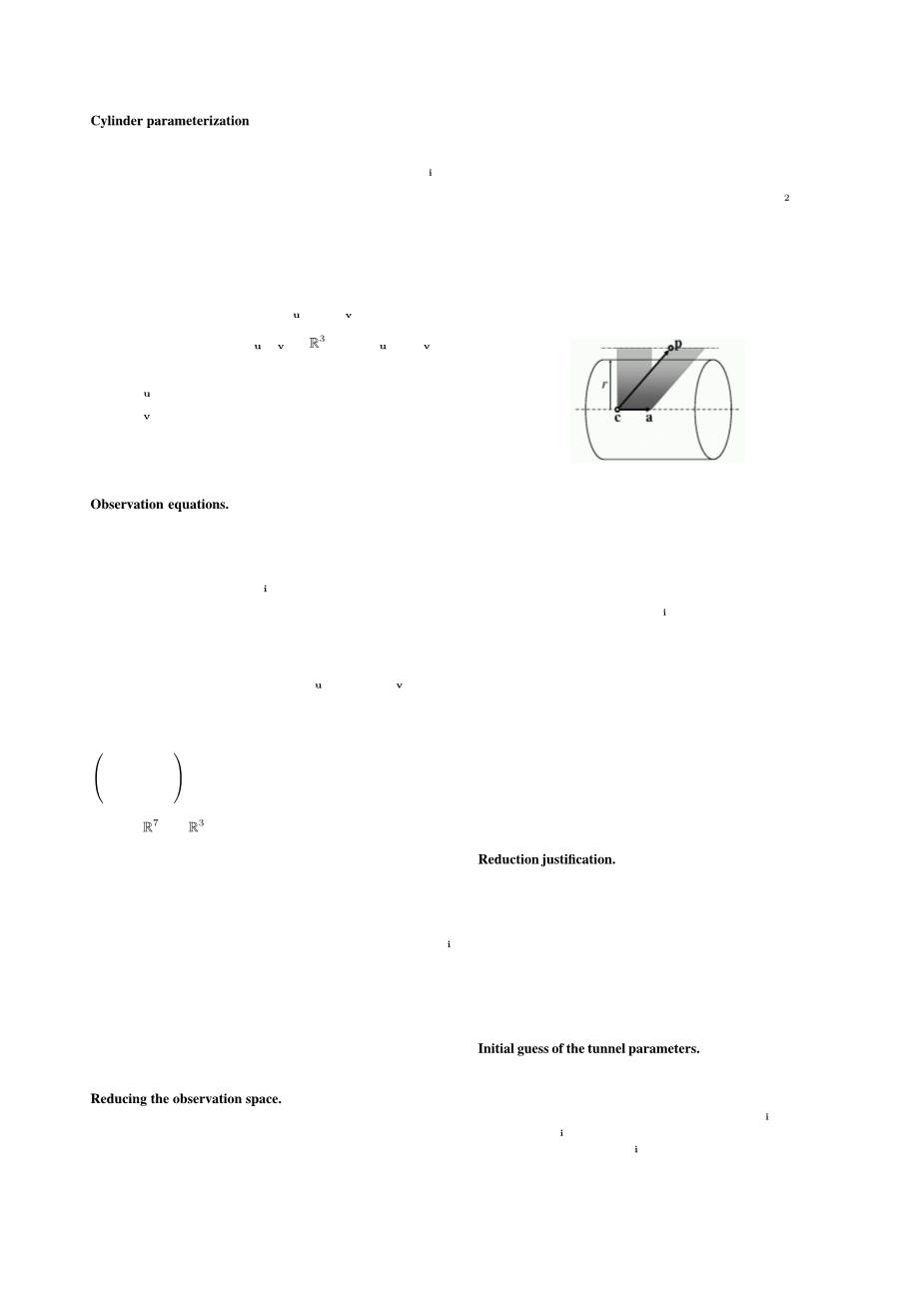
气缸参数化。3D中的气缸有五个自由度,一个用于半径,四个用于轴,其可以分为两个方向参数,两个用于位置。让是观测点的重心或测量点附近的任何其他方便的固定点。用气缸轴方向的单位向量
, (2)
通过指定最接近于p的气缸轴上的点来确定气缸轴的位置
(3)
在的正交基中,其中和由例如,
(4)
.
五个圆柱体参数为。该参数化与(等,1997)中提出的参数化相似。
观察方程。在最小二乘调整(,2000a)中,原始观测中的测量误差最小化。在这种情况下,这些误差是,和为了制定这个最小化问题,观测值被表示为参数的函数。因此,气缸上的点的未知位置也必须作为调节中的参数引入。使用圆柱坐标,使用两个数字来指定沿着轴的位置和周围的旋转,气瓶皮肤上的点q表示为
(5)
每个观察值对观测方程式作出以下贡献:
用 (6)
这里f:描述了上述参数化中的非线性圆柱模型。对于由三个测量组成的每个对象点,引入两个参数,导致的冗余,其中是测量点的数量。上述公式的优点是使用原始观察值,允许适当的误差建模。如果不是原始观测值,则可以简化这些方程,笛卡尔坐标的被使用。然而,在这种情况下,每个点的协方差矩阵成为一个完整的矩阵,而使用原始观察值时,它只是一个对角线矩阵(假定是独立的测量)。上述等式的缺点在于,通过激光扫描,可以测量数百万个点,这导致了一个正方程系统,其尺寸为点数的两倍加五。
减少观察空间。为了保持参数的数量少,进行更简单的调整。不是测量误差,而是测量点与气缸的距离最小化。为此,气缸定义为零点
, (7)
另见图1这里表示矢量长度,矢量交叉乘积。矢量的长度等于由向量和所跨越的平行四边形的面积,其又等于具有相同基数和高度的矩形。使用a 单位向量,作为基础,该区域变得等于高度(仅分别在单位米和)。 可以得出结论,长度等于与气缸轴线的距离。对于气缸皮肤上的一个点,该值恰好是半径。值不仅是代数距离度量,它实际上是隐含函数的值,但它也指定了与圆柱体的欧氏距离。这意味着是矢量的长度到其正交投影到圆柱体上。
图1.气瓶定义与矢量产品
没有测量误差,这个距离总是为零,但在实际情况下,只有它的预期值为0,这个距离被写为。因此,“观察”方程采用以下形式
(8)
在这种形式中,描述气缸的五个参数仍然有待估计。通过指定一个和并引入以下形式的两个附加约束(或高度加权的观察方程):
和 (9)
第一个方程式指定轴向量必须是单位矢量,第二个方程修正圆柱体上点的一个坐标。选择坐标是因为圆柱轴线与坐标系的轴大致对齐。
减少合理化。用上述不同的方法(调整观察值,最小化正交距离和最小化具有过度参数化的正交距离),使用多达10000个点和单位矩阵作为权重矩阵进行数值比较。对于在该隧道研究中遇到的例子,没有发现显着差异,即,结果相等于第七位数。尽管从直观上看,尽量减少点与气缸表面的正交距离,另一方面使测量误差最小化,但应该导致相同的结果,作者指出,这在本文中未被证明。
初始猜测隧道参数。为了进行调整,上述观察方程必须线性化(,2000a)。对于线性化算法的初始化,必须首先计算气缸参数的近似值。为此,通过将该平面拟合到例如测量点来估计测量点中的法向矢量。每个的10个最邻近的,使得在最小二乘方的点的正交距离最小化。 圆柱体的法向量在载体平面与圆柱轴线正交的单位球体上形成一个大圆。因此,通过将平面通过法向量(即单位球体上的点)拟合圆柱体轴的方向来近似。为了确保获得大圆而不是小圆,原点也应包括在该拟合中重量等于法向量数的程序。该平面的法向矢量给出了圆柱轴a的良好的第一近似。 对于本研究中的示例,将观察点的重心作为所有情况下证明的足够的c的近似值。从隧道设计已知一个近似的隧道半径为3m。
停止标准。在将观测值调整到模型中时,寻求模型的参数,以使得观测值相对于方差 - 协方差度量的距离最小化到模型空间。这意味着对于最小二乘法模型调整的解,观测值的残差ecirc;与模型垂直,即。一个好的可靠标准(,1990),进行线性化调整如下
(10)
其中k表示第次迭代后的模型参数的值,是VC矩阵。阈值dagger;应选择得足够小。这里使用的值。
2.2变形分析。
变形分析方法可以分为两部分:第一部分是将一些时期的隧道数据与理想化模型即气缸进行比较。 第二部分是测试两个时代隧道测量之间是否发生(人为)变形的方法。
为了将实际隧道数据与理想化模型进行比较,数据适合模型,并对所得到的残差进行分析。两个历元之间的变形是通过多个步骤确定的:
bull;将两个时期的隧道数据转换成我们的圆柱形坐标系,使所有变形沿一个范围坐标发生。
bull;将这两个时期的数据插入到该坐标系中两个域坐标中的常规网格
bull;考虑到插值点的传播精度,测试两个时期之间网格点的距离坐标的差异是否相关。
圆柱坐标。在变形分析开始之前,所有数据都记录到一个常见的笛卡尔坐标系中。当隧道墙的变形被寻找时,需要一个坐标系,允许通过两个域坐标在隧道壁上表示一个点的位置,并且在该位置处的“信号”作为第三个范围坐标。
图2.圆柱坐标。
这通过图2的坐标系实现。这里,“”表示沿着隧道轴的距离,“”是垂直于隧道轴的平面中的角度,“r”表示该平面与隧道轴的距离。 现在,在固定轴原点之后,隧道壁上的任何位置可以表示为一对,而在该位置处的“信号”由第三坐标给出,距离到隧道轴。坐标转换
(11)
将笛卡尔坐标转换为圆柱坐标,圆柱轴为。
插入到隧道轴的距离。使用这个坐标系,在坐标上定义隧道壁上的网格。在网格单元格内
,
隧道墙被假定为平坦的。通过对网格单元内的所有观测值进行平均,获得位置处的值。 除了值本身之外,其精度如(,2000a)所得,
, (12)
其中是测量的矩阵,并且反映所有个观测值的平均值的模型矩阵。应当注意,严格来说不是内插,其总是不如基础观察精确,而是进行调整。
测试变形。一旦在每个网格点的两个历元1和2之间确定了与圆柱轴的距离的差值,那么如果这样的差异仅仅是由于测量噪声,或者如果实际的变形发生。这可以通过稳定性测试进行测试(,2000b)。在稳定性试验中,A型模拟无变形的情况,这意味着和是同一属性的两个观测值。解决系统
;, (13)
给出调整后的公共距离
, (14)
连同矢量ecirc;的划分残差:
. (15)
考虑到观测的准确性和没有发生变形的假设,仍然要测试零假设,其表示剩余残差的大小是可接受的。测试量其中,自由度在零假设下具有卡方分布:
(16)
对临界值进行测试,其中表示测试的可靠性水平。 如果,则测试表明发生了变形。
在这个测试框架中,可以使用其他测试来代替稳定性测试(,2000b)。如果例如数个数据时代可用,则可以决定实际建模变形并测试该模型是否有效地描述了在测量中发现的变形信号。通常的做法是通过额外的参数来测试模型的扩展是否提供了模型拟合的相关改进。
图3.左图:2e 的照片。右:激光扫描,强度着色,从红色到蓝色。与道路标记的高反射率相反,沥青的低反射率显然是可见的。
3.处理隧道数据
3.1测量设置。
在第二次的测量项目期间,扫描了两倍长度为100米的隧道。由于交通规则,这次扫描必须在一夜内完成。因此,在实际的扫描
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136820],资料为PDF文档或Word文档,PDF文档可免费转换为Word

